hashmap简单记录
- 容量设计
- 扩容
容量设计
hashmap 默认大小是2^4,扩容是成倍的
key进行取模之后,会放到对应的index。
容量是2的n次幂,也是对取模运算的优化。比如容量为8,取模公式是 h % 8,8的2进制是1000,hashmap中的计算,优化为 h & (8-1) 即 h & 7 = h & 0111
就是说取h二进制的后三位。二进制运算速度快,正是容量的考虑才能做这种优化。
扩容
扩容时候,容量为变为两倍。此时会进行位置的移动,原来的key的hashcode,假设是100011110,容量是8 1000
那么原来的index 为 100011110 & 0111 = 110 = 6
扩容后的位置怎么确定,可以直接看100011110后四位 1110,高位为1,那就是移动到6+8的位置 = 14
同样的,假设原来的index 为 100010110 & 0111 = 110 = 6
扩容后看100011110后四位 0110,高位为0,那就保持当前的位置6不变
减少了移动,e.hash & oldCap ,这里是hash & 8 = h & 1000取最高位。if(e.hash & oldCap)==0,放到原始index,if(e.hash & oldCap)==1,放到原始index+oldCap的位置。
jdk1.8中超过了hash冲突导致链表长度>=(8-1),时候,会把链表转化成红黑树存储,提高了查询效率。
hashMap线程不安全的原因:
https://www.zeroheart.xyz/wordpress/?p=1057
后续文章参考:https://mp.weixin.qq.com/s/AixdbEiXf3KfE724kg2YIw
根据泊松分布,在负载因子默认为0.75的时候,单个hash槽内元素个数为8的概率小于百万分之一,所以将7作为一个分水岭,等于7的时候不转换,大于等于8的时候才进行转换,小于等于6的时候就化为链表。
hashTable 是安全的,但是都是用synchronized加锁的,所以效率底下,Hashtable 是不允许键或值为 null 的,HashMap 的键值则都可以为 null。这是因为Hashtable使用的是安全失败机制(fail-safe),这种机制会使你此次读到的数据不一定是最新的数据。
如果你使用null值,就会使得其无法判断对应的key是不存在还是为空,因为你无法再调用一次contain(key)来对key是否存在进行判断,ConcurrentHashMap同理。
实现方式不同:Hashtable 继承了 Dictionary类,而 HashMap 继承的是 AbstractMap 类。
Dictionary 是 JDK 1.0 添加的,没用过。
初始化容量不同:HashMap 的初始容量为:16,Hashtable 初始容量为:11,两者的负载因子默认都是:0.75。
扩容机制不同:当现有容量大于总容量 * 负载因子时,HashMap 扩容规则为当前容量翻倍,Hashtable 扩容规则为当前容量翻倍 + 1。
迭代器不同:HashMap 中的 Iterator 迭代器是 fail-fast 的,而 Hashtable 的 Enumerator 不是 fail-fast 的。
所以,当其他线程改变了HashMap 的结构,如:增加、删除元素,将会抛出ConcurrentModificationException 异常,而 Hashtable 则不会。
cuncurrentHashMap
1.7里面还是数组加链表,增加了segment的概念
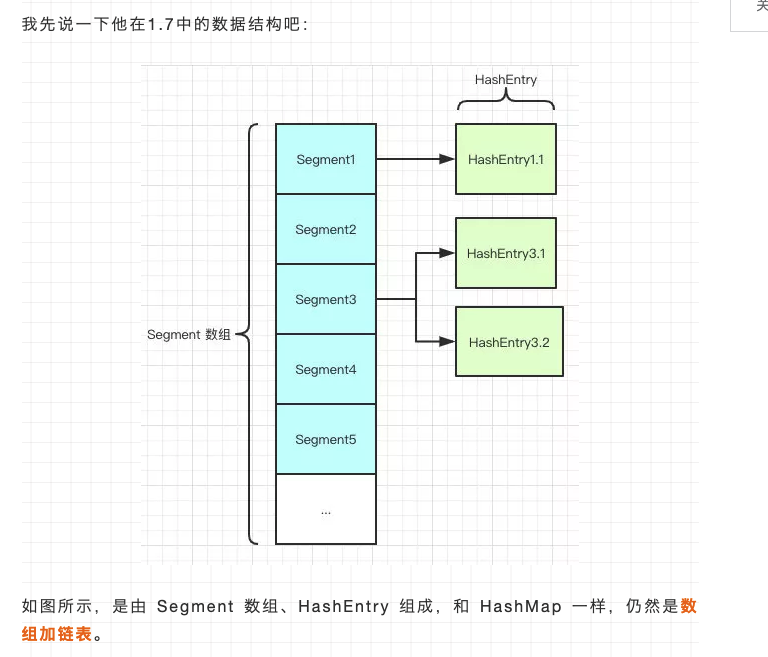
Segment 是 ConcurrentHashMap 的一个内部类,主要的组成如下:
static final class Segment<K,V> extends ReentrantLock implements Serializable {
private static final long serialVersionUID = 2249069246763182397L;
// 和 HashMap 中的 HashEntry 作用一样,真正存放数据的桶
transient volatile HashEntry<K,V>[] table;
transient int count;
// 记得快速失败(fail—fast)么?
transient int modCount;
// 大小
transient int threshold;
// 负载因子
final float loadFactor;
}HashEntry跟HashMap差不多的,但是不同点是,他使用volatile去修饰了他的数据Value,还有下一个节点next。
原理上来说,ConcurrentHashMap 采用了分段锁技术,其中 Segment 继承于 ReentrantLock。
不会像 HashTable 那样不管是 put 还是 get 操作都需要做同步处理,理论上 ConcurrentHashMap 支持 CurrencyLevel (Segment 数组数量)的线程并发。
每当一个线程占用锁访问一个 Segment 时,不会影响到其他的 Segment。
就是说如果容量大小是16他的并发度就是16,可以同时允许16个线程操作16个Segment而且还是线程安全的。
get 逻辑比较简单,只需要将 Key 通过 Hash 之后定位到具体的 Segment ,再通过一次 Hash 定位到具体的元素上。
由于 HashEntry 中的 value 属性是用 volatile 关键词修饰的,保证了内存可见性,所以每次获取时都是最新值。
ConcurrentHashMap 的 get 方法是非常高效的,因为整个过程都不需要加锁。
1.8里面抛弃了原有的 Segment 分段锁,而采用了CAS + synchronized(优化过的,有锁升级的步骤)来保证并发安全性。
跟HashMap很像,也把之前的HashEntry改成了Node,但是作用不变,把值和next采用了volatile去修饰,保证了可见性,并且也引入了红黑树,在链表大于一定值的时候会转换(默认是8)。
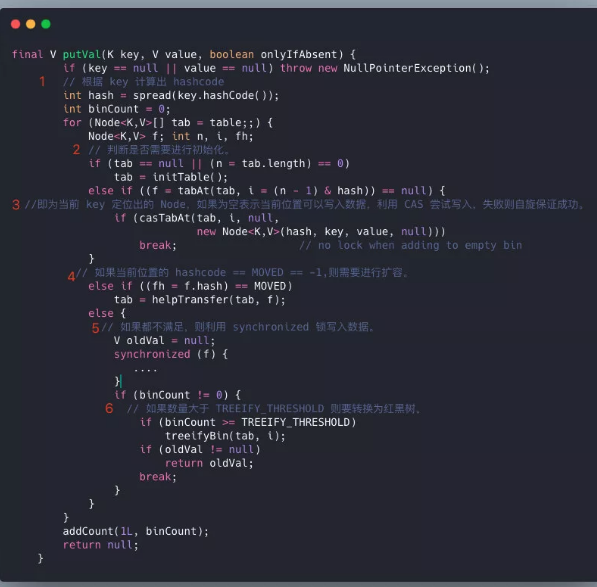
ConcurrentHashMap在进行put操作的还是比较复杂的,大致可以分为以下步骤:
1.根据 key 计算出 hashcode 。
2.判断是否需要进行初始化。
3.即为当前 key 定位出的 Node,如果为空表示当前位置可以写入数据,利用 CAS 尝试写入,失败则自旋保证成功。
4.如果当前位置的hashcode == MOVED == -1,则需要进行扩容。
5.如果都不满足,则利用 synchronized 锁写入数据。
6.如果数量大于TREEIFY_THRESHOLD则要转换为红黑树。
get操作,要看当前的数据结构,采用不同的方式取值
- 根据计算出来的 hashcode 寻址,如果就在桶上那么直接返回值。
- 如果是红黑树那就按照树的方式获取值。
- 就不满足那就按照链表的方式遍历获取值。